Ever watched a drone hover perfectly still, seemingly defying gravity, or zip through the air with uncanny agility? It looks almost magical, but behind that smooth flight is a fascinating blend of physics, engineering, and sophisticated electronics working in concert. Understanding how these unmanned aerial vehicles (UAVs) conquer the skies isn’t just for tech enthusiasts; it reveals incredible ingenuity in miniature packages.
The Fundamental Forces at Play
Like any object that flies, from a jumbo jet to a bumblebee, a drone is subject to four fundamental forces:
- Lift: The upward force that counteracts weight and holds the drone in the air.
- Weight: The downward force due to gravity acting on the drone’s mass (including battery, frame, motors, etc.).
- Thrust: The horizontal force that propels the drone forward (or backward, or sideways).
- Drag: The resistance force from the air that opposes the drone’s motion.
For a drone to hover, lift must exactly equal weight. To climb, lift must exceed weight. To move horizontally, thrust must overcome drag, while lift still balances weight (mostly). It sounds simple, but achieving this balance, especially with the constant small disturbances in the real world like wind gusts, requires precision control.
Generating Lift: The Power of Rotors
Most consumer and commercial drones you see are multi-rotors, commonly quadcopters (four rotors), but sometimes hexacopters (six) or octocopters (eight). These rotors are the drone’s engines and wings rolled into one. Each rotor consists of a motor spinning a propeller.
The magic lies in the propeller blades. They aren’t just flat pieces of plastic; they are shaped like airfoils, similar to tiny airplane wings. As the propeller spins rapidly, its curved upper surface forces air to travel faster than the air passing underneath the flatter bottom surface. According to Bernoulli’s principle, faster-moving air has lower pressure. This pressure difference – lower pressure above the blade, higher pressure below – creates a net upward force: lift.
The amount of lift generated by a single rotor depends primarily on two things:
- Rotation Speed (RPM): The faster the propeller spins, the greater the pressure difference and the more lift it produces.
- Blade Pitch: The angle of the propeller blades relative to the plane of rotation. A steeper pitch moves more air per rotation, potentially generating more lift (but also requiring more power). Most common drones use fixed-pitch propellers and control lift solely by adjusting motor speed.
On a typical quadcopter, two rotors spin clockwise (CW) and two spin counter-clockwise (CCW). This opposing rotation is crucial – it cancels out the rotational torque that would otherwise make the drone’s body spin uncontrollably in the opposite direction of the propellers.
Movement and Control: Dancing on Air Currents
So, the rotors provide lift. But how does a drone move forward, backward, sideways, or turn? It’s all about carefully manipulating the speed of individual rotors relative to each other.
Thrust and Pitch/Roll
Imagine a hovering quadcopter. All four rotors are spinning at a speed that generates lift equal to the drone’s weight.
- To move forward (Pitch Forward): The flight controller slightly increases the speed of the rear rotors and slightly decreases the speed of the front rotors. This tilts the entire drone forward. Now, the total lift force is no longer pointing straight up; it’s angled slightly forward. The vertical component of this force still counteracts gravity, while the horizontal component becomes thrust, pushing the drone forward.
- To move backward (Pitch Backward): The opposite happens – front rotors speed up, rear rotors slow down, tilting the drone backward.
- To move right (Roll Right): The left-side rotors speed up, the right-side rotors slow down. The drone tilts to the right, and the angled lift force provides thrust in that direction.
- To move left (Roll Left): Right-side rotors speed up, left-side rotors slow down, tilting the drone left.
These pitch and roll movements are how drones achieve directional thrust using fixed rotors.
Turning on the Spot: Yaw
Turning the drone to face a different direction without moving from its spot is called yaw. This relies on that clever CW and CCW rotor arrangement. Remember how opposing rotations cancel out torque during hover? To yaw, the flight controller deliberately creates a torque imbalance.
- To Yaw Right (Clockwise): The controller increases the speed of the counter-clockwise (CCW) spinning rotors and decreases the speed of the clockwise (CW) spinning rotors. The overall lift might remain the same (or be adjusted slightly), but the increased drag/torque from the faster CCW rotors overcomes the torque from the now slower CW rotors, causing the drone’s body to rotate clockwise.
- To Yaw Left (Counter-Clockwise): The opposite occurs – CW rotors speed up, CCW rotors slow down, causing a counter-clockwise rotation of the drone’s body.
The Secret Sauce: Sensors and the Flight Controller
Generating lift and thrust is only half the battle. The real challenge is maintaining stability – staying level, holding altitude, and resisting disturbances like wind. This is where the drone’s electronic brain and senses come in.
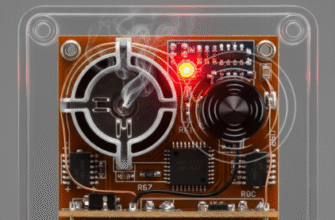
The Flight Controller (FC)
This is a small circuit board, the central processing unit of the drone. It runs sophisticated software (firmware) that takes data from various sensors, interprets it, and sends incredibly fast commands to the Electronic Speed Controllers (ESCs), which in turn tell each motor exactly how fast to spin. Think of it as the drone’s cerebellum and brainstem combined.
The Inertial Measurement Unit (IMU)
This is arguably the most critical sensor package for stability. The IMU typically contains two types of sensors:
- Accelerometers: These measure linear acceleration – changes in velocity. When the drone is level and not accelerating horizontally, the accelerometer primarily detects the constant pull of gravity downwards. If the drone tilts, the direction of gravity relative to the accelerometer changes, allowing the FC to determine the drone’s orientation (pitch and roll angles). They also detect bumps or translational movements.
- Gyroscopes: These measure rotational rates – how fast the drone is rotating around its pitch, roll, and yaw axes. They don’t directly measure the angle, but how quickly that angle is changing. This is vital for detecting and counteracting sudden tilts or spins *before* they become large deviations.
Data from accelerometers and gyroscopes are often fused together by the FC using complex algorithms (like Kalman filters) to get a more accurate and robust estimate of the drone’s current orientation and motion, filtering out noise and sensor drift.
Verified Info: The Flight Controller (FC) and Inertial Measurement Unit (IMU) are the heart and senses of a drone’s stability system. The IMU constantly measures orientation and rotational speed. The FC processes this data thousands of times per second to make micro-adjustments to motor speeds, keeping the drone stable against external forces like wind and internal imbalances.
Other Key Sensors
- Barometer (Barometric Pressure Sensor): Measures atmospheric pressure. Since air pressure generally decreases predictably with altitude, the barometer allows the FC to estimate the drone’s height above its starting point. This is crucial for the “Altitude Hold” function, where the drone maintains a steady height automatically.
- GPS (Global Positioning System): Receives signals from satellites to determine the drone’s latitude and longitude. This is essential for navigation, return-to-home functions, and “Position Hold” (loitering), where the drone stays in one spot horizontally. GPS accuracy can vary, so it’s often supplemented by other sensors.
- Magnetometer (Compass): Detects the Earth’s magnetic field to determine the drone’s heading (which way it’s pointing relative to magnetic north). This helps with navigation and controlling yaw accurately, especially when GPS signals are weak or unreliable.
- Optical Flow / Vision Sensors (More Advanced): Some drones have downward-facing cameras and/or sonar/LiDAR sensors. These can track patterns on the ground or measure distance directly, allowing for very stable hovering and position hold indoors or when GPS is unavailable.
Putting it All Together: The Stability Feedback Loop
Stable flight is achieved through a continuous, high-speed feedback loop:
1. Sensing: The IMU, barometer, GPS, and other sensors constantly monitor the drone’s state (orientation, rotation rates, altitude, position).
2. Processing: The Flight Controller receives this flood of data.
3. Comparison: The FC compares the actual state with the desired state (e.g., level hover, steady climb, commanded movement from the pilot’s remote control).
4. Calculation: Sophisticated control algorithms (often based on PID controllers – Proportional-Integral-Derivative) calculate the necessary adjustments. These algorithms consider the current error (how far off?), the accumulated past error (has it been off for a while?), and the rate of change of the error (is it getting worse quickly?). This allows for smooth, precise corrections without overshooting or oscillating wildly.
5. Actuation: The FC sends precise commands to the ESCs for each motor.
6. Response: The motors adjust their speed almost instantaneously, changing the lift/thrust produced by each rotor.
7. Effect: The changes in rotor speed counteract the detected deviation, bringing the drone back towards its desired state.
This entire loop repeats hundreds or even thousands of times per second. It’s this rapid sensing, processing, and reacting that allows a drone to feel so stable, compensating for tiny imbalances, wind gusts, and control inputs almost before we can perceive them.
Conclusion: A Symphony of Systems
Drone flight isn’t magic; it’s a remarkable symphony conducted by the Flight Controller. Simple aerodynamic principles generate lift via spinning rotors. Precise differential control of these rotors provides movement in all directions. But it’s the constant vigilance of sensors like the IMU, barometer, and GPS, coupled with the lightning-fast calculations and reactions of the FC, that achieves the stable, controlled flight we often take for granted. From the shape of the propeller blade to the complex code running on the processor, every element plays a vital role in letting these amazing machines dance through the air.
“`